Vroobel
-
Liczba zawartości
48 -
Rejestracja
-
Ostatnia wizyta
Zawartość dodana przez Vroobel
-
Witam ponownie, Jako, że temat związany jest z ATM, wrzucam go tu. Dodam, że taki sam wątek zakładam na sąsiednich forach dla spopularyzowania zagadnienia. Odkąd zacząłem przekształcać mojego Dobsona w motoDobsona, szukałem lekkostrawnej informacji, jak to wszystko potem zautomatyzować. O ile nie straszna mi elektronika, jakiś tam mikrokomputer, np. Raspberry Pi, czy programowanie, o tyle ciężko było o samą teorię. Długo szukałem na wielu stronach punktu zaczepienia, a kiedy już mi się wydawało, że go znalazłem, to okazało się, że to ślepy zaułek. Omal umknęło mi, że Janusz P. podpowiedział mi (nie tylko z resztą mnie) znakomitą książkę Jeana Meeusa "Astronomical Algorithms". Wspólnie z kolegą nkmarek opracowaliśmy dwa niezależne systemy, wspierając się nawzajem. Pomyślałem sobie, że przecież nie tylko ja męczyłem się kilka miesięcy nad tym zagadnieniem, dlatego, bazując na wspomnianej książce i "Tabeli Wimmera" (na podstawie której powstaje moja własna zmodyfikowana baza danych) wykonałem skromny serwis przedstawiający moje wyliczenia oraz objaśnienia skomplikowanych wzorów "na żywo". http://astrovroobel.epizy.com/index.php Serdecznie zapraszam do lektury.
-

Konwerter współrzędnych RA/DEC na ALT/AZ
Vroobel odpowiedział Windforce na temat - Astronomia ogólna
O Leszku J. i jego wynalazkach wiem od dawna, ale na jego stronie - co dziwne - jeszcze nie byłem. Dziękuję za linki, chętnie to przejrzę, bo będę robił własną platformę paralaktyczną i będę musiał przemyśleć rodzaj napędu do niej. A co do sterowania teleskopem GOTO-like w wykonaniu Leszka J. to mój projekt jest dużo skromniejszy. Jego rozwiązanie jest doprowadzone do postaci produktu gotowego do sprzedaży, widać lata ciężkiej pracy nad tym projektem. Obiecałem sobie, że któregoś dnia zrobię prawdziwy montaż paralaktyczny, możliwe że na słupie (jak gdzieś osiądę na stałe). Wiem, jakie przekładnie ma EQ8 (łączna przekładnia to chyba ponad 2,6 mln : 1) i postaram się podążyć tym śladem, albo wykonam jeszcze dokładniejsze przekładnie mechaniczne. Może wtedy przemyślę oprogramowanie od nowa. Teraz się trochę spieszę, bo chcę w tym roku uruchomić wszystko (narazie bez platformy) i spróbować gdzieś z tym pojechać. Wystarczy mi wiec to do obserwacji lub krótkiech sesji astrofoto planet. Obecnie spinam mój soft w PHP ze zmodyfikowaną lekko tabelą Wimmera w MySQL, dorobiłem wybór obiektu z możliwością jego zmiany. Niebawem popracuję nad połączeniem serwera PHP z Arduino i sterowaniem silnikami. Dużo jeszcze pracy przede mną... -
Konwerter współrzędnych RA/DEC na ALT/AZ
Vroobel odpowiedział Windforce na temat - Astronomia ogólna
Witam ponownie. Po uwzględnieniu przeliczenia współrzędnych z J2000.0 na dzień, rocznego ruchu własnego obiektu oraz refrakcji w atmosferze, uzyskuję dokładność rzędu kilku - kilkudziesięciu sekund kątowych. Zapewne powinienem uwzględnić jeszcze kilka parametrów i ich zależności. Zrezygnowałem z "magicznego pudełka", jakim jest gotowa biblioteka lub paczka, bo to tylko mnie ogłupia - ale bardzo dziękuję kolegom za to doświadczenie, to był duży krok. Obecnie wszystkie wyliczenia wykonywane są na podstawie wzorów ze wspomnianej wcześniej książki. Ogarnięcie tych wzorów i zaadaptowanie ich do zgodności z językami programowania zajęło nam trochę czau, ale dzięki temu rozumiemy te wzory i nadążamy za oprogramowaniem. Ja aktualnie pracuję nad połączeniem mojego softu (przeniesionego z Pythona do PHP+MySQL) ze zmodyfikowaną i uzupełnioną przeze mnie "tabelą Wimmera" w jedną aplikację web'ową zdolną do sterowania silnikami teleskopu za pośrednictwem Arduino. Zaletą www jest możliwość obsługi systemu z poziomu telefonu, tabletu lub laptopa. Uzyskana dokładność jest wystarczającą do praktycznej realizacji projektu. Nad poprawą dokładności będę się zastanawiał, kiedy już będę mógł osobiście sprawdzić, czy jest niezbędna. W końcu do astrofoto będzie platforma paralaktyczna, a mój GOTO-like system ma tylko ustawić teleskop na obiekt. I ma to zrobić wygodnie!
-
Konwerter współrzędnych RA/DEC na ALT/AZ
Vroobel odpowiedział Windforce na temat - Astronomia ogólna
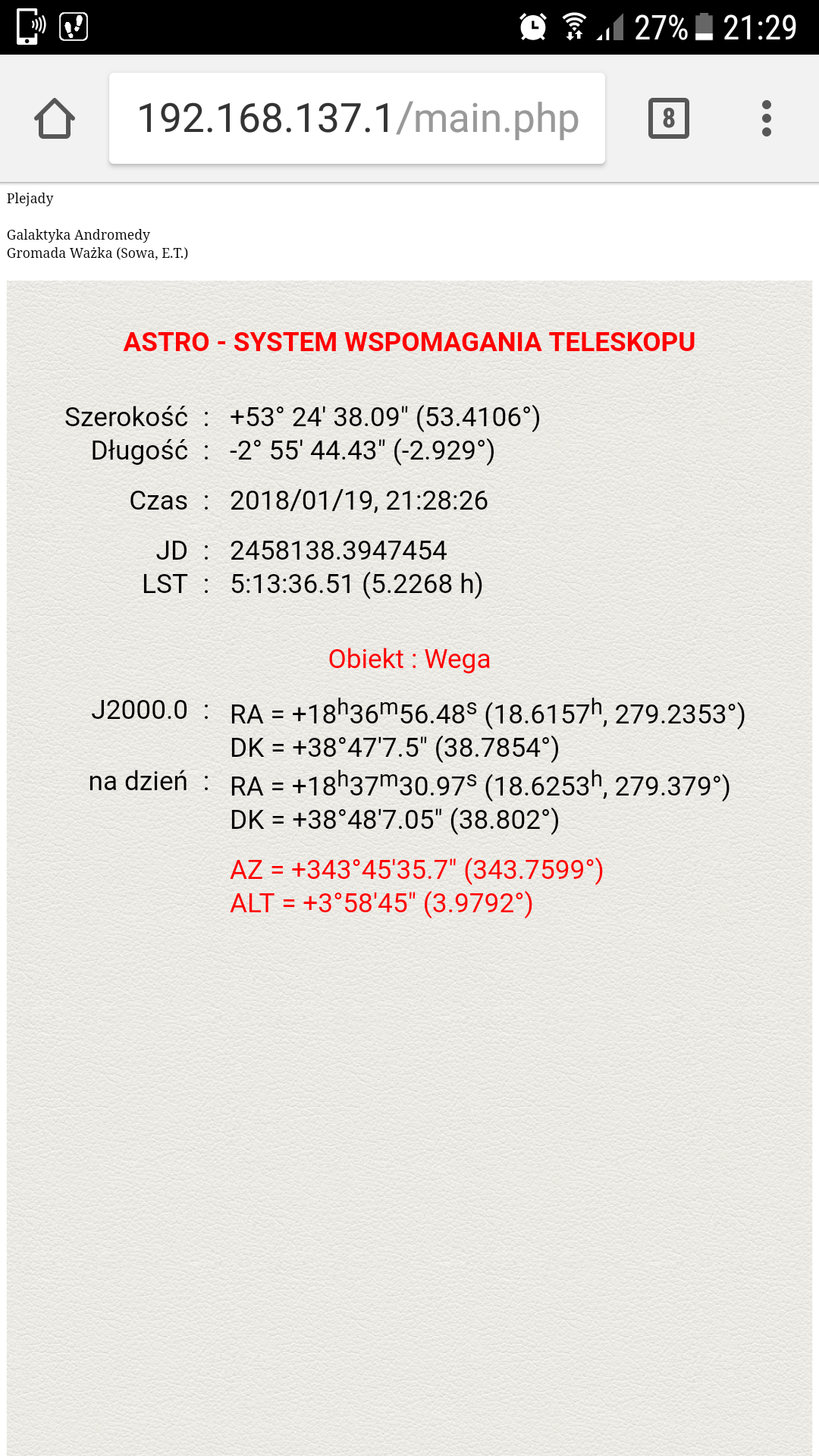
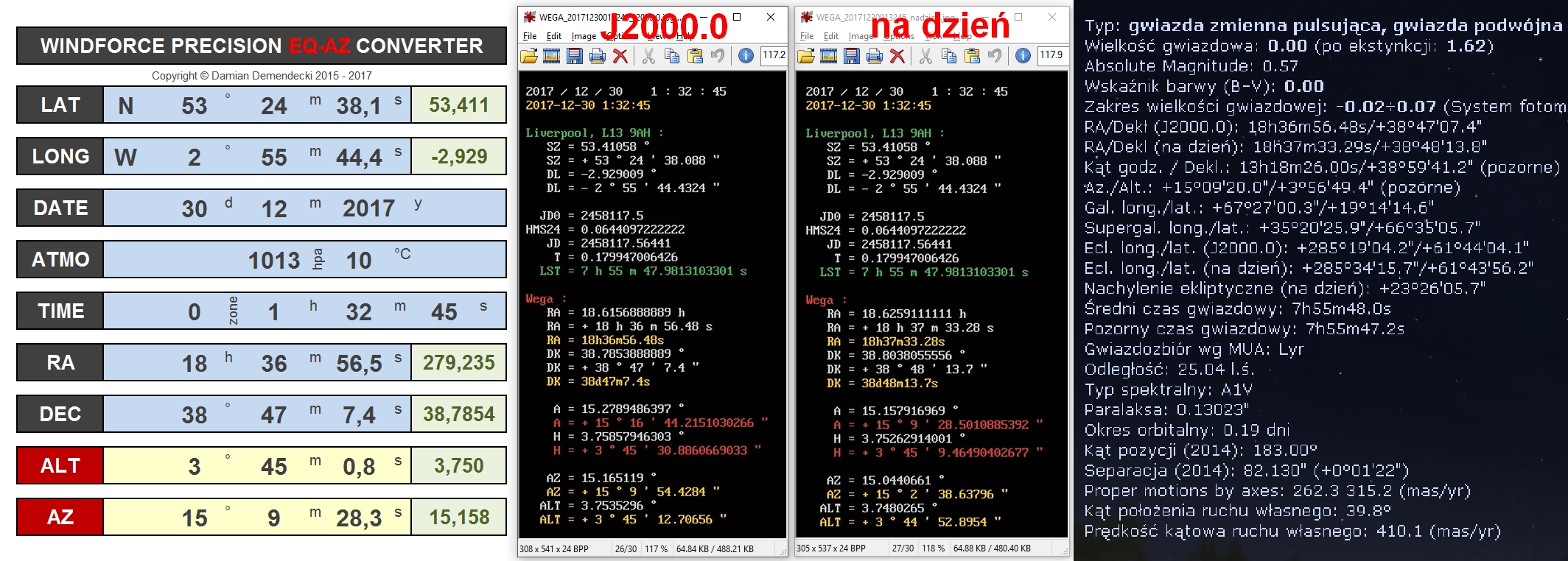
Ech... To jednak nie jest takie proste. Uruchomiłem wirtualne środowisko z Linuxem Ubuntu i przeniosłem tam mój skrypt. Po wstępnym "strojeniu" skryptu (najwyraźniej Python różni się między Windows i Linux) zaimplementowałem paczkę "astropy" i udało mi się uzyskać jakiś wynik. Piszę "jakiś", ponieważ nadal różni się on od danych ze Stellarium. Jak widać na ilustracji na dole, pierwszy jest arkusz kolegi Windforce ustawiony na moje współrzędne i na Wegę (dla J2000.0). Dalej są zrzuty z mojego skryptu, kolejno dla J2000.0 i na minioną noc (2017-12-30, 1:32:45). Ostatni jest wycinek ekranu ze Stellarium. Razem z kolegą nkmarek z sąsiedniego forum siedzimy nad tymi naszymi programami już w sumie dobre kilka dni. Na czerwono możecie zobaczyć dane, jakie uzyskujemy - doprowadziliśmy nasze programy do identyczności wyników. Wczoraj wieczorem uruchomiłem więc tą paczkę "astropy" Na żółto wyświetlam wyniki uzyskane za pomocą "astropy". Zakładając, że Stellarium się nie myli, daleko nam do ideału. Kolega nkamrek podpowiada, że Stellarium dodaje refrakcję światła w atmosferze, co by tłumaczyło zwiększanie się różnicy między naszymi wartościami ALT, a tymi ze Stellarium. Ale zapewne to nie wszystko. Czy zatem "astropy" nie uwzględnia większości - o ile nie wszystkich wymienionych w poniższych cytatach dodatkowych zjawisk? Cytaty pochodzą oczywiście z kilku postów. Jeśli przyjmę, że współrzędne dla J2000.0 są poprawnym punktem wyjścia dla "astropy", to uzyskałem całkiem niezłą dokładność dla AZ (około 34,42"), jednakże ALT różni się tu aż o ponad 11,5' ! Możliwe, że główną rolę gra tu refrakcja. Czy znajdzie się zatem ktoś uprzejmy, kto podpowie, jakiego algorytmu użyć, by uzyskać dokładność dla ALT w granicach 1' ? Podkreślam, że nie spodziewam się cudów, bo mój napęd z natury swej konstrukcji (AZ i ALT) posiada dokładność 9,28" (około 1'/6) na pojedynczy mikrokrok silnika krokowego w osi AZ oraz 13,86" w osi ALT (około 1'/4). Jeśli COKOLWIEK mi z tego wyjdzie, to może zastanowię się nad silnikami z wbudowanymi przekładniami: 10:1 dla AZ i 15:1 dla ALT, co zrówna zaistniałą dysproporcję i zwiększy dokładność 10-krotnie. Do tego jednak czasu muszę bawić się tym, co mam. Będę wdzięczny za kolejne wskazówki.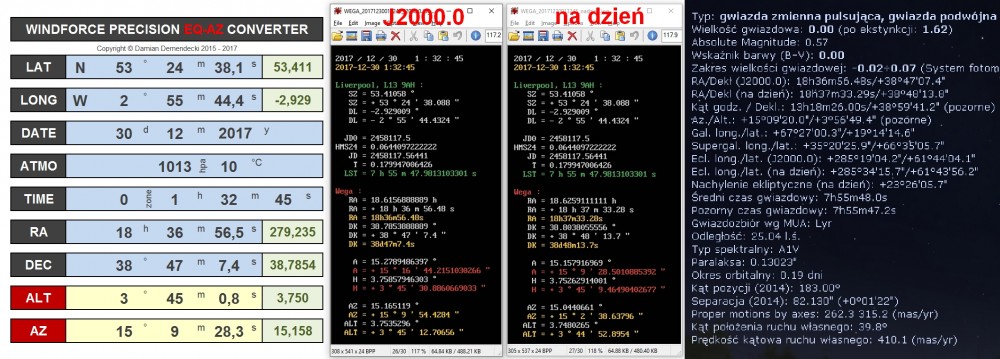
-
Konwerter współrzędnych RA/DEC na ALT/AZ
Vroobel odpowiedział Windforce na temat - Astronomia ogólna
Dzięki Wam, Koledzy, dzięki Arku! Właśnie w Pythonie napisałem ten swój skrypt, a że jeszcze nie mam Maliny, piszę to w Visual Studio. Dziś nie mogłem się tym zająć, mam nadzieję, że jutro mi się uda. -
Konwerter współrzędnych RA/DEC na ALT/AZ
Vroobel odpowiedział Windforce na temat - Astronomia ogólna
Dziękuję za sugestię. Postaram się to sprawdzić jeszcze dziś wieczorem. Tymczasem problem polega na tym, że chciałbym wyliczać współrzędne na Raspberry Pi + Linux, pozwalając Arduino sterować zaledwie silnikami na podstawie uzyskanych z równań danych. A tu już biblioteka *.dll niewiele pomoże. Kto wie, może zamiast Linuxa postawie na Malinie dedykowany Windows... -
Konwerter współrzędnych RA/DEC na ALT/AZ
Vroobel odpowiedział Windforce na temat - Astronomia ogólna
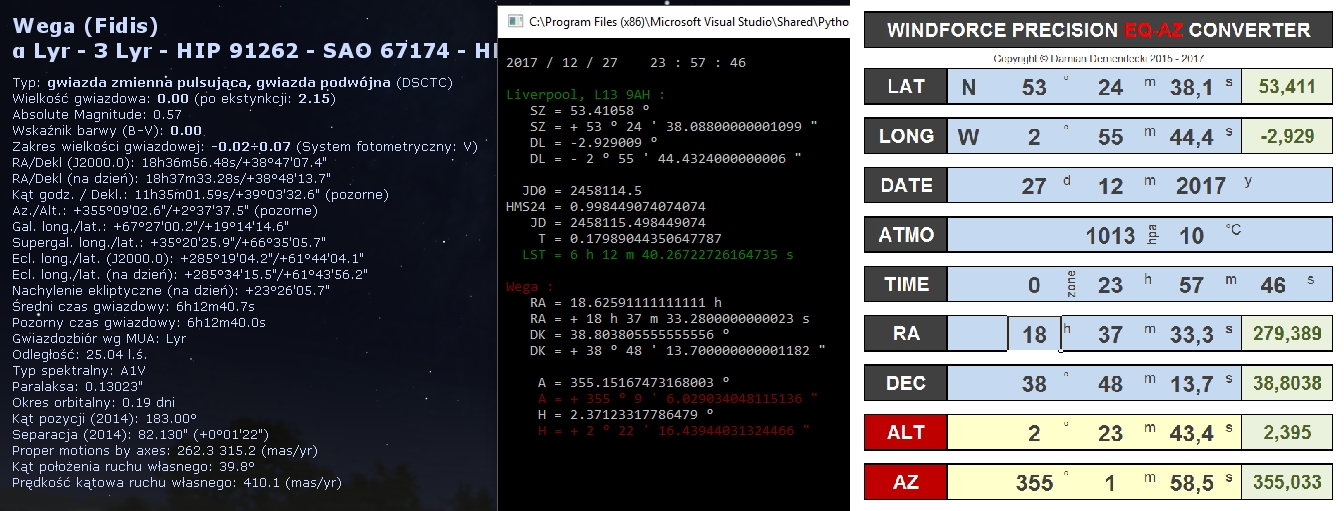
Witam, Przede wszystkim gratuluję uzyskanej precyzji, no i uporu i cierpliwości. Wiem co piszę, bo sam się zmagam z konwersją pod mojego zmotoryzowanego Dobsona z silnikami krokowymi i Arduino. Ja niestety nie mogę się pochwalić aż taką dokładnością, a możliwe, że mam gdzieś jakiś błąd. Nad transformacją pracuję wspólnie z kolegą z sąsiedniego forum. Korzystamy z książki "Astronomical Algorithms" autorstwa Jeana Meeusa, ale każdy z nas pisze swój soft po swojemu, tylko razem porównujemy wyniki i poprawiamy się wzajemnie. Po wykonaniu głównego zadania, jakim jest wyliczenie AZ i ALT mamy pewne rozbieżności, a porównujemy je ze Stellarium. Pobrałem Kolegi arkusz i wprowadziłem dane, jakie uchwyciłem na zrzucie ekranu. Ja mieszkam w Liverpool, Stellarium uwzględnia dokładne współrzędne miejsca obserwacji. Wykonałem zrzut porównujący wszystkie trzy wyliczenia i każde jest inne. W moim wyliczeniu (środkowe okienko) AZ (u mnie A) raczej zgadza się ze Stellarium, nie zgadza się natomiast ALT (u mnie H). Tymczasem moje AZ nie zgadza się z Kolegi AZ, za to ALT jest bardzo zbliżony do ALT Kolegi. Rozumiem, że nie uwzględniam mnóstwa wymienionych w postach wyżej parametrów, ale skąd się biorą się takie różnice? Dodam, że do wyliczeń nie brałem jako źródła RA/DK na J2000.0, tylko na dany dzień i widzę, że to się zmienia, ale wrócę to tego, jeśli to będzie konieczne. Zakładam, że skoro LST się zgadza, to GMST i JD również jest wyliczone poprawnie, co z resztą sprawdzałem na różnych stronkach www na etapie opracowywania wzorów. Celem (moich) wyliczeń jest umożliwienie teleskopowi samodzielne naprowadzenie się na obiekt wybrany z (mojej) bazy danych. Mnie nie chodzi o dokładność poniżej 1 arcsec, bo prowadzeniem zajmie się niebawem platforma paralaktyczna, ale tylko o to, żeby wycelować mniej więcej w obiekt, jeśli nie wiem, gdzie on jest na niebie, albo LP nie pozwala mi na dostrzeżenie go bez teleskopu. Różnice w moich wyliczeniach sięgają od kilku do kilkunastu minut kątowych, może nie warto się spinać, skoro mogę ręcznie (kontrolerem na kabelku i silnikami) dociągnąć teleskop "do celu" o te kilka minut, a platforma zrobi swoje. Chciałbym jednak uzyskać najlepszą precyzję bez podcinania sobie żył... Proszę o podpowiedź.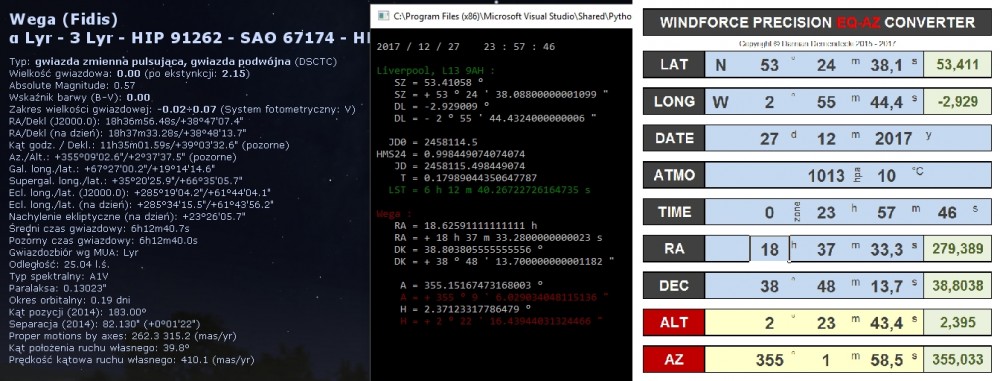
-
Witam ponownie. Oto jak silniczki napędzają mój teleskop. Szybki ruch: Powolny ruch: Oczywiście możliwy jest też tryb pojedynczych kroków - wystarczy pojedyncze naciśnięcie przycisku (lub wychylenie drążka, w zależności od użycia gamepad'a lub joystick'a). Pozdrawiam.
-
Przed chwilą umieściłem na blogu opis zastosowanych elementów elektrycznych i elektronicznych oraz aranżacji całości. Zapraszam serdecznie. https://astrovroobel.wordpress.com/2017/08/07/elektronika-i-kabelki/
-
Na moim blogu pojawił się własnie opis napędu w osi poziomej. Obecnie teleskop jest już w pełni zmotoryzowany, trwają natomiast prace nad elektroniczną częścią sterowania. Rozwiązanie oparte na klonie Arduino w wersji Nano i przewodowym kontrolerze konsoli Nintendo będzie opisane niebawem.
-
Moja intuicja podpowiada mi to samo. Dziękuję, piękne zdjęcia... Właśnie wczoraj w nocy skończyłem mechanikę do napędu w osi poziomej, więc teraz obie osie mają napęd. Roboczo działa, ale muszę teraz "posprzątać", czyli pomalować i ogarnąć kabelki i elektronikę w skrzynce. Zaraz potem, jak pogoda pozwoli, biegnę ze sprzętem na ogród i spróbuję zrobić serię zdjęć Słońca i jakiejś planety, lub dwóch. Pozdrawiam.
-
Tak, własnie to poruszenie podejrzewam, ale każde z wymienionych jest prawdopodobne. Z drugiej strony czytałem, że nie ma sensu stosować filtru solarnego na całej aperturze (choć taki planuję wykonać), ponieważ niestabilność atmosfery i tak n ie pozwala na dobre zdjęcia. Jak to jest w rzeczywistości?
-
Macie w tym wózku blokowane koła? Polecam. Blokada podwojna: blokuje koła i rotację w pionowej osi.
-
Witam, Jeśli można, również pochwalę się własnoręcznie wykonanym wozkiem: https://astrovroobel.wordpress.com/2017/07/13/platforma-na-kolach/ Mam na tym postawiony Dobson i 10" lustro, razem około 28kg. Jeżdżę z tym po ogrodzie i przed domem, kiedy mi się Jowisz chowa za sąsiednie domy... Pozdrawiam.
-
Hej. Ja zrobiłem na tym aluminiowym łożysku zawieszenie Dobsona w osi pionowej. Przeczytaj sam: https://astrovroobel.wordpress.com/2017/07/13/platforma-na-kolach/ Działa super i dodatkowo mam już założony silnik krokowy. Nie żałuję zakupu.
-
Na moim blogu pojawił się kolejny opis, tym razem jest to coś konkretnego: napęd montażu w osi pionowej w oparciu o silnik krokowy. Zachęcam zainteresowanych do lektury i do komentarzy tu, na forum. Pozdrawiam.
-
Jak obiecałem wcześniej, informuję tym razem o umieszczeniu na moim blogu opisu łożyskowych rolek, na których opiera się OTA. Obecność tego zmodyfikowanego zawieszenia w obu osiach sprawia, że "od tej chwili teleskop można obracać w dowolnej osi dosłownie jednym palcem".
-
Miło mi poinformować, że umieściłem kolejny wpis na moim blogu opisujący ułożyskowanie w osi pionowej. Zapraszam do lektury, ale już teraz mogę napisać, że efekt jest powalający. Cytując samego siebie "W efekcie, po skręceniu całości, mam możliwość porównania: podczas, gdy w pionie nadal mam do pokonania opór tarcia, w poziomie mogę obracać podstawę popychając ją własną twarzą, a dokładnie okolicą oka opartą na muszli okularu. Nie ma tu mowy o przeleceniu teleskopem poza obiekt (oczywiście w płaszczyźnie poziomej), sprzęt zatrzymuje się dokładnie tam, gdzie zdejmuję przyłożoną do niego siłę. Idealnie." Być może moje opisy pomogą komuś niskim kosztem przełamać toporność montażu Dobsona. Nie ukrywam, że moim celem jest pełna motoryzacja obu osi montażu w oparciu o silniki krokowe, a kto wie, może i postaram się o napęd focuser'a, bo Arduino w zakupionym zestawie z trzema kontrolerami silników na to pozwala. Pierwotny plan zakłada użycie gamepad'a z Nintendo do sterowania silnikami, ale w dalekim planie jest zaciągnięcie do pracy Stellarium.
-
Zgadza się. Oglądając różne rozwiązania napędów musiałem wybrać własną drogę, a taka nie rzuciła mi się w oczy na żadnym z forów. Oparłem się na pasku zębatym GT2 10mm, ale zobaczymy za kilka dni, co z tego wyjdzie. Obecnie kolega pracuje nad sprytnym sterowaniem silnika krokowego, więc muszę jeszcze chwilę poczekać.
-
Hehe... Miałem napisać kilka słów o sobie, a wyszło inaczej. Od zawsze lubiłem patrzeć w nocne niebo. Do niedawna zaledwie zaczytywalem się na temat kosmosu, uwielbiam wizyty w Planetarium, filmy popularnonaukowe itp. Dopiero niedawno mogłem sobie pozwolić na teleskop, ale wiedziałem, że mogę kupić wcześniej coś tańszego i zapewne później myśleć o czymś lepszym. Obserwowanie Kosmosu jest fajne samo w sobie, ale zrobienie przy tym kilku fotek to dodatkowa satysfakcja. A że lubię majsterkowanie, to nie straszne mi modyfikacje. Lubię, jak coś ma ręce i nogi, jak nie tylko działa, ale też cieszy oko. No to by było tyle na mój temat. Dalej będę się skupiał na teleskopie...
-
Witam serdeczne, To mój pierwszy post, więc kilka słów o mnie na początek. Długo, bardzo długo czekałem na swój pierwszy teleskop i miałem dużo czasu, żeby wszystko przemyśleć. Wybór padł na 10" Newtona produkcji firmy Bresser. Niestety, pewne jego zalety posiadają też swoje przeciwieństwo, jego stabilność i łatwość utrzymania równowagi mimo załadowania dodatkowego osprzętu wiąże się z pokonywaniem dużych oporów tarcia. Zestaw jest też dość ciężki, a więc niemobilny. Postanowiłem więc wykonać kilka przeróbek i dodatków. Najbardziej kluczowa jest modyfikacja zawieszenia poprzez dodanie systemu łożysk. Zaraz potem, ale po części równolegle, jest w planie wyposażenie zestawu w napęd w oparciu o silniki krokowe. O swoich zmaganiach piszę na blogu: astrovroobel.wordpress.com Zapraszam do lektury. Ewentualne komentarze proszę wpisywać tutaj. Założyłem tego bloga po to, by podzielić się pomysłami. Pewne prace są już na zaawansowanym etapie, ale opiszę je dopiero, gdy skończę daną modyfikację, więc proszę o cierpliwość. Np. ułożyskowanie w osi pionowej jest już praktycznie zakończone. Umieszczę tu stosowną informację, gdy będę miał znów się czym pochwalić. Można też subskrybować moje wpisy. Nad kierunkiem modyfikacji i jej realizacją intensywnie pracuje że mną kolega Krzysztof. Za wskazówki dziękuję też koledze Andrzejowi.